Loading...
Searching...
No Matches
Rugby ball
This example follows the classic "rugby ball" example by Borrvall & Petersson 2003.
The objective is to minimize the dissipation
\[ \mathcal{F} = \frac{1}{|\Omega_\text{obj}|}\int \frac{1}{2} \left[ \nabla \mathbf{u} \cdot \left(\nabla \mathbf{u} + (\nabla \mathbf{u})^T \right) + \chi \mathbf{u} \cdot \mathbf{u} \right] d\Omega, \]
subject to a volume constraint
\[ \mathcal{C} = \frac{1}{|\Omega_\text{opt}|}\int_{\Omega_\text{opt}} \rho d\Omega. \]
More information regarding objectives and constraints can be found in Objectives and constraints.
The following depicts the optimization history for various volume constraints
Design field.
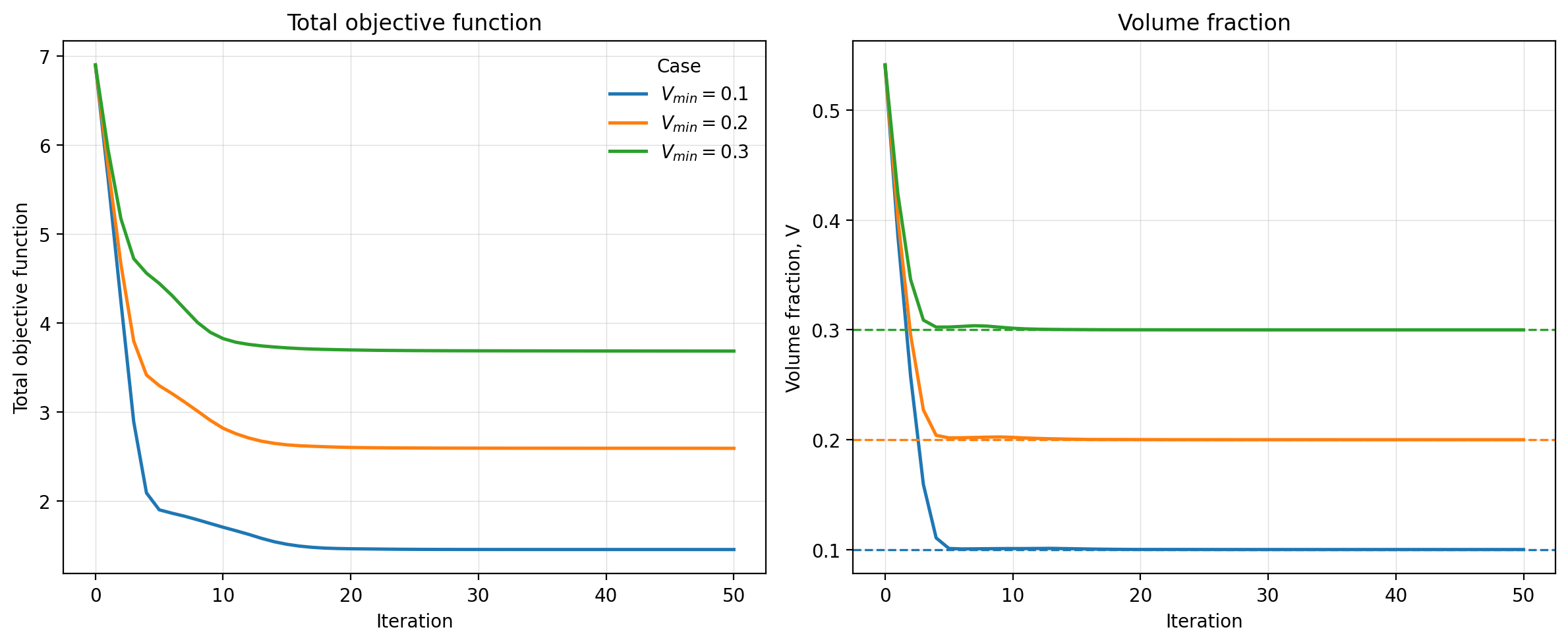
Convergence history.